
pauljoy.com/10-dinge-die-deine…r-sicherer-machen-konnen/
10 Dinge die deinen Kopter retten könnten

Click here for the English version of this post.
Falls du dich für Kopter interessierst, wirst du zweifellos all die spektakulären Crashes auf Youtube gesehen haben und darüber gehört haben, das Kopter eigenständig weggeflogen sind. Kopter, wie die DJI Inspire 1 oder die Phantom 3, sind hoch komplexe Gebilde, die darauf vertrauen, durch unterschiedliche Systeme bestens gesteuert zu werden.
Weil man keine Garantie hat, dass nicht doch Hardware oder Software-Probleme auftreten können, gibt es einige Dinge die du tun kannst, die Chance, dass es crashed, zu minimieren. Hier sind meine besten Tipps, welche helfen können, deinen Kopter sicherer zu machen.

1. Erkenne wann und wann nicht der Kompass kalibriert werden sollte.
Eine Anzahl Leute empfehlen den Kompass jedes mal zu kalibrieren, wenn an einem anderen Ort geflogen werden soll. Obwohl dies für einige zu funktionieren scheint, denke ich dennoch, dass es unnötige Risiken mit sich bringt. Lass mich erklären warum…
Wenn man eine Kompass-Kalibrierung durchführt, veranlasst man den Kopter seine Umgebung bzgl. die magnetischen Kräfte zu ermitteln und wenn die Kalibrierung abgeschlossen ist, speichert er diese Daten und nimmt an, dass diese Einflusskräfte normal für den derzeitige Ort sind, und folgerichtig auch während des Fluges. Aber was ist, wenn unter dem Straßenpflaster auf dem man steht, ein ausgedehntes elektrisches Kabel oder eine metallische Rohrleitung, vergraben ist? In einem solchen Fall bezieht die gerade durchgeführte Kalibrierung solche Effekte mit in Betracht und nach dem Start wird der Kopter somit mit nicht korrekten Kompassdaten fliegen.
Sofern man nicht seit dem letzten Flug mehrere hundert Kilometer entfernt gereist ist, gibt es keine wirkliche Notwendigkeit den Kompass zu re-kalibrieren, wenn man schon eine gute Kalibrierung abgespeichert hat. Wenn man sich aber in einem unerschlossenen Gebiet befindet, dann ist das ein guter Augenblick, sich eine saubere Kompass-Kalibrierung zu schnappen. Andererseits, warum soll man eine gute Kalibrierung ersetzen an einem Ort, von dem man keine Ahnung hat, welche unbekannten Kräfte sich dort abspielen.
2. Erkenne wann und wann nicht die IMU kalibriert werden sollte.
Eine IMU Kalibrierung resettet die Gyroskop(Kreisel) und die Accelerometer (Beschleunigungsmesser) Werte um dem Flugzeug mitzuteilen, wann es perfekt in Ruhe ist und nicht in Bewegung. Ich selbst führe eine IMU Kalibrierung nur nach einem Firmware-Update durch, oder wenn ich in ein anderes Land gereist bin, und der Kopter dabei durch Stöße oder große atmosphärische Änderungen gelitten haben könnte.
Um zu einer guten IMU Kalibrierung zu kommen, sollte der Kopter nicht zu heiß sein, deshalb sollte dies nie unmittelbar nach einem Kopter-Lauf geschehen. Der Kopter sollte für mindestens 10 Minuten ausgeschaltet gewesen sein, idealerweise an einem kühlen Ort sein, wie z.B. in einem klimatisierten Raum oder in einem kühlen Klima. Der Kopter sollte dauerhaft stabil stehen und idealerweise mit einer Wasserwaage von Motor zu Motor auf ein perfektes Niveau ausgerichtet werden. Jeder Fuß kann mit einem Stück unter ge-legtem Papier justiert werde, solange bis der Kopter perfekt nivelliert ist. Einmal nivelliert, sollte die IMU Kalibrierung sobald als möglich nach dem Einschalten des Kopters gestartet werden und dann darf während der Kalibierung keinerlei Bewegung des Kopters erfolgen.
Ist die IMU Kalbrierung einmal vollendet, dann ist sie gut bis zum nächsten Firmware-Update, außer der Kopter wurde zwischenzeitlich starken Kräften (Stößen) ausgesetzt.
3. Überprüfe die Sensoren vor jedem Flug
Nun, mit Blick auf die Punkte unter 1. und 2. braucht man somit keinerlei Kalibrierung vor einem Flug durchzuführen, jedoch ist es sehr wichtig zu überprüfen, was von den Sensoren ausgelesen wird, um zu verstehen, wann ein Eingreifen erforderlich wird.
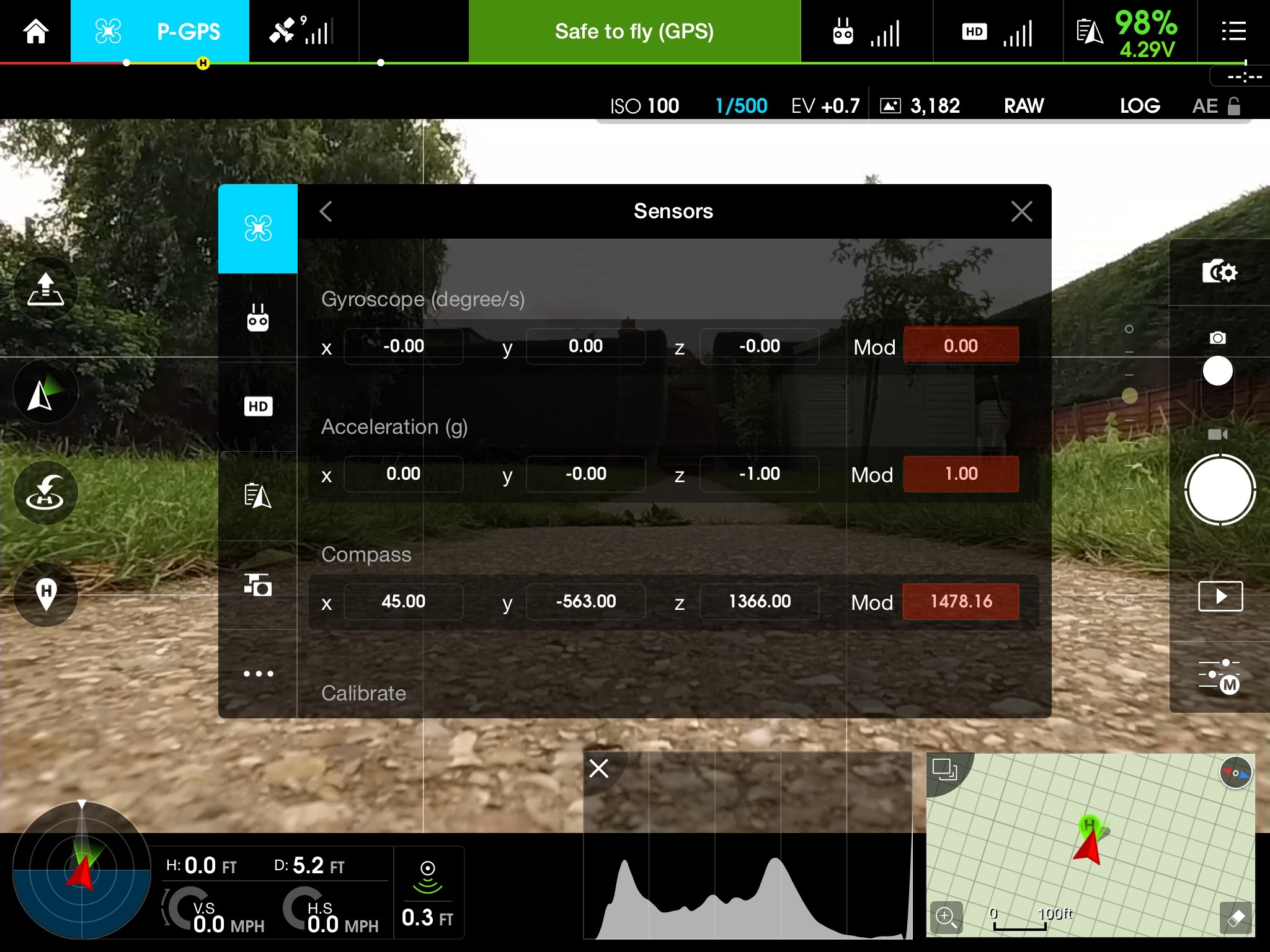
Wenn der Kopter eingeschaltet ist und die DJI App läuft, kann man zur „MC Settings“ Seite gehen und dort runter scrollen und die Sensor-Ansicht wählen, was dann so aussieht wie auf dem Bild unten.
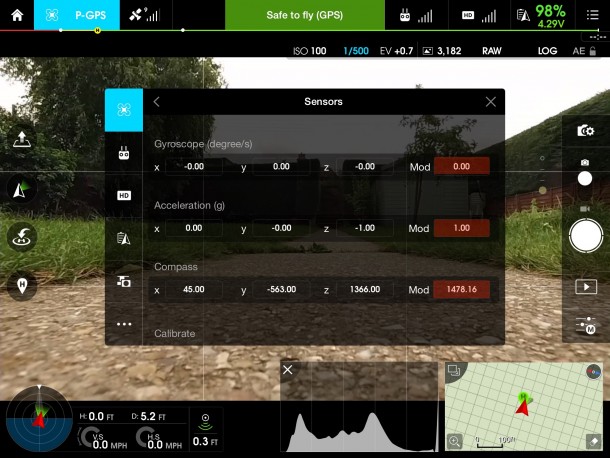
Ich habe die Werte, die benötigt werden, zur Verdeutlichung rot markiert. Der Kompass-Wert ist der untere der drei MOD-Werte. Diese MOD-Zahl wird immer schwanken, aber ich bevorzuge, das der Wert zwischen 1400 & 1599 bleibt. Ein guter Test ist es, diese Seite offen zu lassen und dann den Kopter herum zutragen und zu beobachten, wie verschiedene Objekte diese Werte beeinflussen. Wenn man innerhalb eines Hauses ist, dann wird man starke Änderungen in der Nähe von Stromkabeln und Rohrleitungen sehen und wenn man den Kopter nach draußen bringt, über Straßenpflaster, dann wird man möglicherweise auch große Änderungen sehen, da verborgene Rohre oder vergrabene Stromkabel Einfluß haben.
Wenn du feststellst, dass die MOD-Zahl an dem Ort an dem du fliegen willst, außerhalb des Bereiches liegt, dann versuche den Kopter von einem anderen Ort zu starten, wo die ausgelesene Zahl besser ist. Wenn du aber keine normalen Werte erreichen kannst, dann versuche den Kopter in Kopfhöhe zu halten, es könnte sein, dass irgendetwas unterirdisches die Werte beeinflusst und es besser wäre, sie einmal zu löschen.
Das ist es, warum es so wichtig ist, nicht blindlings zu kalibrieren, man braucht das Verständnis, was passiert mit den Sensoren, um dann dementsprechend zu kalibrieren.
Wenn ich in einer Gegend bin, wo die Werte am Boden außerhalb des Bereichs sind, dann vertraue ich generell der Kompass Kalibrierung, die ich schon eingefroren hatte und führe Starten und Landen im ATTI-Mode aus, so dass die Bodeninterferencen das System nicht beeinflußen können. Es ist einleuchtend, dass ein sicheres Fliegen wahrscheinlich nicht gegeben ist, wenn die Werte sehr weit schwanken Es gibt kein narrensicheres Prüfprozedere, aber es ist besser, das Verständnis darüber zu haben, was die Koptersensoren sich einfangen, als in einer Umgebung zu Kalibrieren, ungeachtet dessen, ob diese Umgebung das Gleiche erbringt, wie das, was man zuvor eingefroren hat.
Die anderen markierten Zahlen zeigen die MOD Werte für Gyroscope und Accelerometer. Nach meiner Erfahrung variieren diese Werte nur um 0.1, wenn eine IMU Kalibrierung abgeschlossen ist. Es ist klar, wenn man größere Differenzen feststellt und der Kopter dabei nicht in Bewegung ist, dann sollte man nicht fliegen, da die IMU nicht korrekt kalibriert ist!.
4. Lande bei 30% Batterieladung und hüte dich vor 10% Failsafe
Es ist wichtig mit ausreichend Batterieladung in Reserve zu landen, weil, wenn etwas geschieht, dass die Landung verzögert, man noch genug Zeit hat, entweder einen neuen Landeplatz zu finden oder das Problem direkt zu behandeln. Den anderen wichtigen Faktor, den man beachten sollte ist, das, wenn die Batterieladung auf 10% geht, ein DJI Inspire 1 oder ein Phantom 3 automatisch das „Smart Go-Home“ Feature initiiert und zu seinem Home-Point lenken wird.
Während das nach Hause kommen bei „10%“ noch wie nach ein nützliches Feature aussieht , kann es aber dennoch desaströs sein. Nehmen wir mal an, man entscheidet sich, den Kopter in der Nähe runter zubringen, wo er auch gestartet wurde. Alles könnte nach Plan gehen, aber wenn die Batterie nur noch 10% hat, ändert der Kopter in diesem Augenblick automatisch seine Richtung und lenkt zum Home Point und man hat wenig Zeit zu reagieren. Wenn da irgendwelche Bäume oder andere Hindernisse zwischen Kopter und Startpunkt liegen, wird er direkt in diese hinein fliegen.
Vor kurzem hat DJI eine Option hinzugefügt, mit der man „Smart Go-Home“ abschalten kann, welches man auf dem folgenden Bild sehen kann.
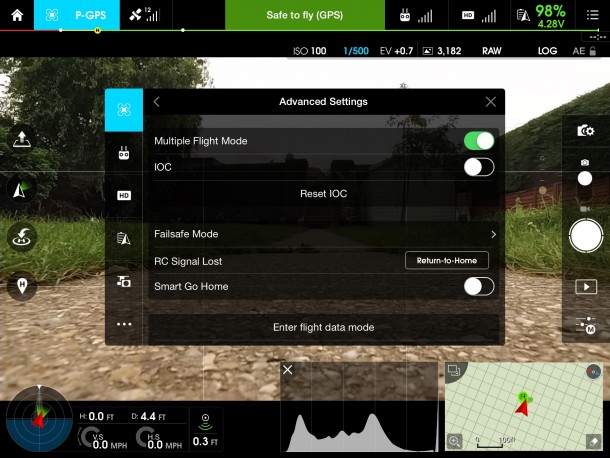
Durch Abschalten dieser Option wird der Kopter einfach eine Landung an dem augenblicklichen Ort initiieren, wenn denn mal 10% unterschritten werden, anstatt nach Hause zu lenken. Wie auch immer, es erfordert einen Eingriff bei jedem Flug, außer es gibt Gründe, wo es besser ist, Smart Go-Home eingeschaltet zu lassen.
5. Überprüfe die Failsafe Höhe und den Home Point zu jedem Flug
Wenn der Kopter das Signal der Fernsteuerung verliert oder der Pilot die „Return-Home“ Funktion aktiviert, steigt der Kopter zu einer vorbestimmter Höhe, bevor er zum Home punkt lenkt. Man muss immer das Gebiet überprüfen, in welchem man fliegt und die bestmögliche Annahme treffen, welche denn die sicherste Höhe für den Kopter für den Rückflug ist, ohne dabei dann auf Hindernisse zu treffen. Eine Versuchung ist es, die max. erlaubte Höhe vorzugeben, aber es könnte sich eine Situation geben, in der die Batterieladung schon zu gering ist, oder das Fliegen in dieser Höhe könnte andere Gefahren für den Kopter oder andere Luftnutzer bedeuten. Es ist besser eine Höhe zu wählen, in der man sicher frei ist von jeglichen Hindernissen ohne dabei in der max. Höhe zu fliegen.

Es ist ebenso wichtig zu überprüfen, dass der korrekte Home-Point vor jedem Flug gesetzt ist. Wenn die Motoren starten, sollte eine Audio-Warnung ertönen: „The home point has been updated, please check it on the map“. Es lohnt sich dies zu kontrollieren, es gibt einem die Sicherheit, dass der Home-Point auch dort, ist wo er sein soll.
6. Schalte Tablet und Smartphones in den Flugmodus
Jedes Gerät das sendet, kann einen Einfluss auf die Kommunikation zwischen Kopter und Fernsteuerung haben. Die meisten DJI Systeme verwenden 2.4GHz als Sendefrequenz, welches dieselbe Frequenz ist, die auch von den häuslichen WiFi Anlagen verwendet wird.
Während die beiden nebeneinander existieren können, so können doch Interferenzen entstehen, womit die sichere Kontroll-Entfernung zum Kopter geringer wird, so sollten möglichst immer Smartphones oder besonders Tablets, die für die Fernsteuerung verwendet werden, in den Flugmodus geschaltet werden, was alle Ausgangssignale der Geräte abschaltet, inklusive Bluetooth- und Telefonkommunikation.
Einen Nachteil, den der Flugmodus mit sich bringt ist, das die Live Map View keine weiteren Daten mehr nachladen kann. Man kann jedoch die Map vorher laden, bevor man in den Flugmodus schaltet, und in den Bereich scrollen in dem man fliegen will. Die Map sollte sichtbar bleiben, wenn dann der Flugmodus eingeschaltet wird.
Wenn die Map nicht vorhanden ist, dann prüft man, ob „Check Map in the Background“ in den „General Settings“ in der Go-App eingeschaltet ist.
Laut Kopterforum ist dies nur bei IOS vorhanden und bei Android generell eingeschaltet. Dort gibt es diesen Punkt nicht. (hinzugefügt vom Übersetzer)
7. Gib acht mit P-GPS, steuere mit ATTI
Die zwei Haupt-Flugmodi bei einem DJI Kopter sind P-GPS und ATTI (attitude mode). GPS zur Stabilisierung des Kopters zu verwenden ist extrem praktisch, der Kopter stoppt und hält die Position die zugewiesen wurde und hilft einem sogar bei windigen Situationen in die richtige Richtung zu fliegen. Auch fortschrittliche GPS-Modi werden verwendet, solche wie Folge Mir (Follow me), Umkreisungs Modus (POI) als auch Waypoint Führung und diese sind alle sehr nützlich, aber man sollte sich erinnern, das jedesmal wenn ein GPS-Modus verwendet wird, der Kopter im Wesentlichen selbst fliegt. Man kann dem System zwar mitteilen wo man hin möchte, aber der Kopter trifft die Entscheidungen „wie komme ich dahin“ eigenständig. Gelegentlich können Dinge auch mal schief gehen!
Viele Leute machen den Fehler anzunehmen, dass sie die volle Kontrolle haben, wenn sie im GPS-Modus fliegen und sind höchst frustriert, wenn irgendetwas schief geht und der Kopter unkontrollierbar wird. Anstatt zu versuchen mit dem defekten GPS System zu kämpfen, sollte man in solchen Situationen die Kontrolle durch Umschalten auf den ATTI-Modus selbst übernehmen.
Als erstes ist zu bemerken, das DJI standardmäßig den Zugriff zum ATTI-Modus an der Fernsteuerung nicht vorgesehen hat. Ja, da ist ein feiner kleiner Schalter bezeichnet mit P und A, aber auf A geschaltet, wird der ATTI-Modus jedoch nicht eingeschaltet, außer man gibt ihn vorher in der DJI Go-App frei.
Im Bild oben beachte man die Option „Multiple Flight Mode“. Erst mit Multiple Flight Mode aktiviert, kann man mit dem Schalter an der Fernbedienung auf „A“ = ATTI-Modus schalten. Fliegen im ATTI-Modus unterscheidet sich jetzt nicht allzu sehr vom Fliegen im GPS-Modus: der Kopter wird seine Höhe auch weiterhin beibehalten und die Kontrolle funktioniert noch genauso. Der Hauptunterschied ist, dass der Kopter nun nicht mehr seine Position automatisch hält, er wird nun durch Wind und auch durch seine eigene Trägheit beeinflusst.
Ich denke immer über den ATTI-Modus als einen Kieselstein auf einem zugefrorenen See: Wenn man ihm einen Stoß in eine Richtung gibt, er wird sie beibehalten, um ihn zu stoppen muß man ihn in die entgegengesetzte Richtung stoßen. Praktiziere das Fliegen im ATTI im DJI Simulator und dann versuche es auf einem freien Feld, wo es genügend Platz gibt, um auch mal Fehler zu machen. Es sollte nicht sehr lange dauern den Kopter in der Griff zu bekommen, und dann hast du das Können die Kontrolle zu übernehmen wenn GPS ausfällt oder GPS nicht richtig funktioniert.
Ich betrachte P-GPS immer als ein nur gelegentlich einzusetzendes Feature und fliege die meiste Zeit im ATTI-Modus.
Ich starte immer im ATTI-Modus da man im schlimmsten Fall einen GPS Defekt erst nach dem Start entdeckt, wenn man wenig Zeit hat sich auf die Situation einzustellen.
Ganz offensichtlich erfordert dies umsichtiges Verhalten wenn es windig ist, so soll man es mit Bedacht versuchen und sich über die Windrichtung und Windgeschwindigkeit bewusst sein.
8. Überprüfe Propeller und überprüfe sie nochmals
Ich sehe so viele Berichte von Leuten deren Kopter wegen eines weg geflogenen Propellers gechrashed ist. Während ich mir sicher bin, das ein Propeller verschleißen oder brechen kann er, nehme ich an, dass in den meistens Fällen der Propeller beim ersten Mal nicht fest aufgesetzt worden ist. Wir Menschen tendieren dazu, Fehler zu machen und wenn wir dies wiederholt machen, wie beim Aufsetzen der Propeller, so ist es sehr leicht etwas zu übersehen.
Falls selbst sichernde Props verwendet werden, kurbelt sie auf, und haltet dann den Motor fest für das abschließende Festziehen des Propellers. Beim Inspire1 kann man mit prop-locks das Risiko weiter reduzieren, dass sich ein Propeller lockert. Falls DJI’s neue quick release props mit Inspire1 or Matrice verwendet werden, gilt es sicherzustellen, das jeder Propeller in seiner Rastposition aufgesteckt wird.
9. Nutze eine Pre-Flight Check Liste
Eine Pre-Flight Check Liste zu verwenden kann langweilig sein, besonders wenn du aufgeregt bist und gerade starten willst, jedoch es gibt keinen besseren Weg, als das du dir versichern kannst, alles getan zu haben, um einen betriebssicheren Flug zu gewährleisten.
Es ist nicht übermäßig kompliziert, wenn du dich nicht ungeschickt anstellst, und jeden Schritt aufschreibst, wirst du feststellen, das es nicht allzu nervig ist all dies anzuwenden. Schreibe einfach die Grunddinge auf und lies es vor dem Aufstieg durch. Es kann so einfach sein wie das folgende:
Airframe: Prepare & check
RC: Fit iPad, cable & Hood
Antennas: correct position
Props & Locks: attach & check
RC Battery: Check min 75%
RC Switches: Correct mode & Gear Down
iPad: App running, map cached, Airplane mode, Volume Up.
Airframe: Position for takeoff
Props: 2nd check
Power On: Check battery 100%
Sensors: Compass 1400 – 1599
Sensors: IMU +/- 0.1
Failsafe: Set failsafe height
Satellite: At least 7 sats & safe to fly box
Flight Mode: Correct mode selected
Start Motors: CSC command
Home Point: Blue dot Location correct on map
Initial Check: motor sound check
Climb: climb to 2m
Control Tests: Test all controls
GPS & ATTI Test: Test both modes function correctly
Landing Gear: Raise Gear and fly!
10. Sichtverbindungslinie= Linie der Kommunikation
Wenn man seinen Kopter noch sehen kann, dann sind die Chancen groß, dass die Fernbedienung auch mit ihm kommunizieren kann. Entfernungen können einen Effekt auf die Radio Kommunikation haben und die Gesetze variieren von Land zu Land, wie weit man einen Kopter fliegen darf. Hier in UK sind wir limitiert auf die Sichtverbindung (definiert als 500m entfernt vom Piloten). Es ist nicht alles über Entfernungen. Gehen wir davon aus, man filmt einen kreisrunden Wasserturm, der lediglich 30 entfernt ist und man denkt über einen schönen Drumherumflug fürs Fotoshooting nach. Selbst wenn der Kopter nur 40 m von uns entfernt ist, wenn er um den Turm herumfliegt, ist die Chance sehr wohl gegeben, dass die Kontrolle des Kopters verloren geht, da das Radiosignal nicht durch den Turm hindurch gesendet werden kann. In diesem Moment schaltet der Kopter in den Failsafe Modus, steigt auf die vorgegebene Höhe auf und fliegt zum Home Point zurück. Falls man die Failsafe-Flughöhe höher als den Turm eingegeben hat und keine anderen Hindernisse auf der Flugroute liegen, ist alle schön und gut. Falls jedoch die Failsafe Höhe niedriger als die Turmhöhe war, dann kann man goodbye Kopter sagen.
Versuche es und halte den Kopter zu allen Zeiten auf Sichtlinie.
11. Erkenne wann VPS abzuschalten ist
Okay, ich weiß das sind mehr als 10 Punkte, dieser eine hier ist ein Bonus.
Der Phantom 3 als auch der Inspire 1 beinhalten beide VPS (Vision Positioning System) Module, die dabei helfen, Position und Niveau bei niedrigen Höhen zu halten. Die meiste Zeit wird einem das VPS helfen, aber es gibt Situationen, in denen es zu Problemen führen könnte, wenn es freigeschaltet ist.
Wenn man im Hause fliegt oder auch außerhalb, wo es Objekten oberhalb vom Kopter gibt, möchte man sich wünschen, das VPS abzuschalten, allein dafür, das der Kopter seine Höhe nicht automatisch hält. Falls z.B. der Kopter über Objekte auf dem Boden fliegt, VPS ist freigeschaltet, resultiert das in einer Anpassung der Höhe, wenn er über jedes Objekt fliegt und kollidiert dadurch möglicherweise mit der Zimmerdecke oder mit Hindernissen über ihm.
Man kann das VPS in der Go-App abschalten, wie im Bild unten sehen kann.

12. Starte immer mit einer voll geladenen Batterie
So die Nennung von nur 10 Dingen mag ein Fehler gewesen sein…. ! Ich hätte dieses noch hinzuzufügen, weil ich einige Crash Berichte gesehen habe, wo der Flug mit zuvor genutzten Batterien gestartet wurde. Es lautete da normalerweise so…
“Ich startete meinen Flug mit 80% Batterieladung und alles war gut, dann plötzlich fiel die Ladungsanzeige auf 7% WTF! “
DJI beantwortete solche Kommentare mit Hinweis darauf, das die intelligenten Batterien vor jedem Start voll geladen sein sollen „as per the manual“, um für ihr Verbrauchs-Monitoring zuverlässige Resultate abzuliefern. Während man wahrscheinlich manchmal mit einer halb geladenen Batterie,rausgehen möchte, könnte obiges passieren, Sei vorsichtig und halte dich in der Nähe auf und flieg nicht soweit vom Landepunkt entfernt.
Ich hoffe all dies erweist sich als nützlich.
Many thanks to Ulrich Schneider for the German Translation. – Paul.
10 Dinge die deinen Kopter retten könnten
Click here for the English version of this post.
Falls du dich für Kopter interessierst, wirst du zweifellos all die spektakulären Crashes auf Youtube gesehen haben und darüber gehört haben, das Kopter eigenständig weggeflogen sind. Kopter, wie die DJI Inspire 1 oder die Phantom 3, sind hoch komplexe Gebilde, die darauf vertrauen, durch unterschiedliche Systeme bestens gesteuert zu werden.
Weil man keine Garantie hat, dass nicht doch Hardware oder Software-Probleme auftreten können, gibt es einige Dinge die du tun kannst, die Chance, dass es crashed, zu minimieren. Hier sind meine besten Tipps, welche helfen können, deinen Kopter sicherer zu machen.
1. Erkenne wann und wann nicht der Kompass kalibriert werden sollte.
Eine Anzahl Leute empfehlen den Kompass jedes mal zu kalibrieren, wenn an einem anderen Ort geflogen werden soll. Obwohl dies für einige zu funktionieren scheint, denke ich dennoch, dass es unnötige Risiken mit sich bringt. Lass mich erklären warum…
Wenn man eine Kompass-Kalibrierung durchführt, veranlasst man den Kopter seine Umgebung bzgl. die magnetischen Kräfte zu ermitteln und wenn die Kalibrierung abgeschlossen ist, speichert er diese Daten und nimmt an, dass diese Einflusskräfte normal für den derzeitige Ort sind, und folgerichtig auch während des Fluges. Aber was ist, wenn unter dem Straßenpflaster auf dem man steht, ein ausgedehntes elektrisches Kabel oder eine metallische Rohrleitung, vergraben ist? In einem solchen Fall bezieht die gerade durchgeführte Kalibrierung solche Effekte mit in Betracht und nach dem Start wird der Kopter somit mit nicht korrekten Kompassdaten fliegen.
Sofern man nicht seit dem letzten Flug mehrere hundert Kilometer entfernt gereist ist, gibt es keine wirkliche Notwendigkeit den Kompass zu re-kalibrieren, wenn man schon eine gute Kalibrierung abgespeichert hat. Wenn man sich aber in einem unerschlossenen Gebiet befindet, dann ist das ein guter Augenblick, sich eine saubere Kompass-Kalibrierung zu schnappen. Andererseits, warum soll man eine gute Kalibrierung ersetzen an einem Ort, von dem man keine Ahnung hat, welche unbekannten Kräfte sich dort abspielen.
2. Erkenne wann und wann nicht die IMU kalibriert werden sollte.
Eine IMU Kalibrierung resettet die Gyroskop(Kreisel) und die Accelerometer (Beschleunigungsmesser) Werte um dem Flugzeug mitzuteilen, wann es perfekt in Ruhe ist und nicht in Bewegung. Ich selbst führe eine IMU Kalibrierung nur nach einem Firmware-Update durch, oder wenn ich in ein anderes Land gereist bin, und der Kopter dabei durch Stöße oder große atmosphärische Änderungen gelitten haben könnte.
Um zu einer guten IMU Kalibrierung zu kommen, sollte der Kopter nicht zu heiß sein, deshalb sollte dies nie unmittelbar nach einem Kopter-Lauf geschehen. Der Kopter sollte für mindestens 10 Minuten ausgeschaltet gewesen sein, idealerweise an einem kühlen Ort sein, wie z.B. in einem klimatisierten Raum oder in einem kühlen Klima. Der Kopter sollte dauerhaft stabil stehen und idealerweise mit einer Wasserwaage von Motor zu Motor auf ein perfektes Niveau ausgerichtet werden. Jeder Fuß kann mit einem Stück unter ge-legtem Papier justiert werde, solange bis der Kopter perfekt nivelliert ist. Einmal nivelliert, sollte die IMU Kalibrierung sobald als möglich nach dem Einschalten des Kopters gestartet werden und dann darf während der Kalibierung keinerlei Bewegung des Kopters erfolgen.
Ist die IMU Kalbrierung einmal vollendet, dann ist sie gut bis zum nächsten Firmware-Update, außer der Kopter wurde zwischenzeitlich starken Kräften (Stößen) ausgesetzt.
3. Überprüfe die Sensoren vor jedem Flug
Nun, mit Blick auf die Punkte unter 1. und 2. braucht man somit keinerlei Kalibrierung vor einem Flug durchzuführen, jedoch ist es sehr wichtig zu überprüfen, was von den Sensoren ausgelesen wird, um zu verstehen, wann ein Eingreifen erforderlich wird.
Wenn der Kopter eingeschaltet ist und die DJI App läuft, kann man zur „MC Settings“ Seite gehen und dort runter scrollen und die Sensor-Ansicht wählen, was dann so aussieht wie auf dem Bild unten.
Ich habe die Werte, die benötigt werden, zur Verdeutlichung rot markiert. Der Kompass-Wert ist der untere der drei MOD-Werte. Diese MOD-Zahl wird immer schwanken, aber ich bevorzuge, das der Wert zwischen 1400 & 1599 bleibt. Ein guter Test ist es, diese Seite offen zu lassen und dann den Kopter herum zutragen und zu beobachten, wie verschiedene Objekte diese Werte beeinflussen. Wenn man innerhalb eines Hauses ist, dann wird man starke Änderungen in der Nähe von Stromkabeln und Rohrleitungen sehen und wenn man den Kopter nach draußen bringt, über Straßenpflaster, dann wird man möglicherweise auch große Änderungen sehen, da verborgene Rohre oder vergrabene Stromkabel Einfluß haben.
Wenn du feststellst, dass die MOD-Zahl an dem Ort an dem du fliegen willst, außerhalb des Bereiches liegt, dann versuche den Kopter von einem anderen Ort zu starten, wo die ausgelesene Zahl besser ist. Wenn du aber keine normalen Werte erreichen kannst, dann versuche den Kopter in Kopfhöhe zu halten, es könnte sein, dass irgendetwas unterirdisches die Werte beeinflusst und es besser wäre, sie einmal zu löschen.
Das ist es, warum es so wichtig ist, nicht blindlings zu kalibrieren, man braucht das Verständnis, was passiert mit den Sensoren, um dann dementsprechend zu kalibrieren.
Wenn ich in einer Gegend bin, wo die Werte am Boden außerhalb des Bereichs sind, dann vertraue ich generell der Kompass Kalibrierung, die ich schon eingefroren hatte und führe Starten und Landen im ATTI-Mode aus, so dass die Bodeninterferencen das System nicht beeinflußen können. Es ist einleuchtend, dass ein sicheres Fliegen wahrscheinlich nicht gegeben ist, wenn die Werte sehr weit schwanken Es gibt kein narrensicheres Prüfprozedere, aber es ist besser, das Verständnis darüber zu haben, was die Koptersensoren sich einfangen, als in einer Umgebung zu Kalibrieren, ungeachtet dessen, ob diese Umgebung das Gleiche erbringt, wie das, was man zuvor eingefroren hat.
Die anderen markierten Zahlen zeigen die MOD Werte für Gyroscope und Accelerometer. Nach meiner Erfahrung variieren diese Werte nur um 0.1, wenn eine IMU Kalibrierung abgeschlossen ist. Es ist klar, wenn man größere Differenzen feststellt und der Kopter dabei nicht in Bewegung ist, dann sollte man nicht fliegen, da die IMU nicht korrekt kalibriert ist!.
4. Lande bei 30% Batterieladung und hüte dich vor 10% Failsafe
Es ist wichtig mit ausreichend Batterieladung in Reserve zu landen, weil, wenn etwas geschieht, dass die Landung verzögert, man noch genug Zeit hat, entweder einen neuen Landeplatz zu finden oder das Problem direkt zu behandeln. Den anderen wichtigen Faktor, den man beachten sollte ist, das, wenn die Batterieladung auf 10% geht, ein DJI Inspire 1 oder ein Phantom 3 automatisch das „Smart Go-Home“ Feature initiiert und zu seinem Home-Point lenken wird.
Während das nach Hause kommen bei „10%“ noch wie nach ein nützliches Feature aussieht , kann es aber dennoch desaströs sein. Nehmen wir mal an, man entscheidet sich, den Kopter in der Nähe runter zubringen, wo er auch gestartet wurde. Alles könnte nach Plan gehen, aber wenn die Batterie nur noch 10% hat, ändert der Kopter in diesem Augenblick automatisch seine Richtung und lenkt zum Home Point und man hat wenig Zeit zu reagieren. Wenn da irgendwelche Bäume oder andere Hindernisse zwischen Kopter und Startpunkt liegen, wird er direkt in diese hinein fliegen.
Vor kurzem hat DJI eine Option hinzugefügt, mit der man „Smart Go-Home“ abschalten kann, welches man auf dem folgenden Bild sehen kann.

Durch Abschalten dieser Option wird der Kopter einfach eine Landung an dem augenblicklichen Ort initiieren, wenn denn mal 10% unterschritten werden, anstatt nach Hause zu lenken. Wie auch immer, es erfordert einen Eingriff bei jedem Flug, außer es gibt Gründe, wo es besser ist, Smart Go-Home eingeschaltet zu lassen.
5. Überprüfe die Failsafe Höhe und den Home Point zu jedem Flug
Wenn der Kopter das Signal der Fernsteuerung verliert oder der Pilot die „Return-Home“ Funktion aktiviert, steigt der Kopter zu einer vorbestimmter Höhe, bevor er zum Home punkt lenkt. Man muss immer das Gebiet überprüfen, in welchem man fliegt und die bestmögliche Annahme treffen, welche denn die sicherste Höhe für den Kopter für den Rückflug ist, ohne dabei dann auf Hindernisse zu treffen. Eine Versuchung ist es, die max. erlaubte Höhe vorzugeben, aber es könnte sich eine Situation geben, in der die Batterieladung schon zu gering ist, oder das Fliegen in dieser Höhe könnte andere Gefahren für den Kopter oder andere Luftnutzer bedeuten. Es ist besser eine Höhe zu wählen, in der man sicher frei ist von jeglichen Hindernissen ohne dabei in der max. Höhe zu fliegen.
Es ist ebenso wichtig zu überprüfen, dass der korrekte Home-Point vor jedem Flug gesetzt ist. Wenn die Motoren starten, sollte eine Audio-Warnung ertönen: „The home point has been updated, please check it on the map“. Es lohnt sich dies zu kontrollieren, es gibt einem die Sicherheit, dass der Home-Point auch dort, ist wo er sein soll.
6. Schalte Tablet und Smartphones in den Flugmodus
Jedes Gerät das sendet, kann einen Einfluss auf die Kommunikation zwischen Kopter und Fernsteuerung haben. Die meisten DJI Systeme verwenden 2.4GHz als Sendefrequenz, welches dieselbe Frequenz ist, die auch von den häuslichen WiFi Anlagen verwendet wird.
Während die beiden nebeneinander existieren können, so können doch Interferenzen entstehen, womit die sichere Kontroll-Entfernung zum Kopter geringer wird, so sollten möglichst immer Smartphones oder besonders Tablets, die für die Fernsteuerung verwendet werden, in den Flugmodus geschaltet werden, was alle Ausgangssignale der Geräte abschaltet, inklusive Bluetooth- und Telefonkommunikation.
Einen Nachteil, den der Flugmodus mit sich bringt ist, das die Live Map View keine weiteren Daten mehr nachladen kann. Man kann jedoch die Map vorher laden, bevor man in den Flugmodus schaltet, und in den Bereich scrollen in dem man fliegen will. Die Map sollte sichtbar bleiben, wenn dann der Flugmodus eingeschaltet wird.
Wenn die Map nicht vorhanden ist, dann prüft man, ob „Check Map in the Background“ in den „General Settings“ in der Go-App eingeschaltet ist.
Laut Kopterforum ist dies nur bei IOS vorhanden und bei Android generell eingeschaltet. Dort gibt es diesen Punkt nicht. (hinzugefügt vom Übersetzer)
7. Gib acht mit P-GPS, steuere mit ATTI
Die zwei Haupt-Flugmodi bei einem DJI Kopter sind P-GPS und ATTI (attitude mode). GPS zur Stabilisierung des Kopters zu verwenden ist extrem praktisch, der Kopter stoppt und hält die Position die zugewiesen wurde und hilft einem sogar bei windigen Situationen in die richtige Richtung zu fliegen. Auch fortschrittliche GPS-Modi werden verwendet, solche wie Folge Mir (Follow me), Umkreisungs Modus (POI) als auch Waypoint Führung und diese sind alle sehr nützlich, aber man sollte sich erinnern, das jedesmal wenn ein GPS-Modus verwendet wird, der Kopter im Wesentlichen selbst fliegt. Man kann dem System zwar mitteilen wo man hin möchte, aber der Kopter trifft die Entscheidungen „wie komme ich dahin“ eigenständig. Gelegentlich können Dinge auch mal schief gehen!
Viele Leute machen den Fehler anzunehmen, dass sie die volle Kontrolle haben, wenn sie im GPS-Modus fliegen und sind höchst frustriert, wenn irgendetwas schief geht und der Kopter unkontrollierbar wird. Anstatt zu versuchen mit dem defekten GPS System zu kämpfen, sollte man in solchen Situationen die Kontrolle durch Umschalten auf den ATTI-Modus selbst übernehmen.
Als erstes ist zu bemerken, das DJI standardmäßig den Zugriff zum ATTI-Modus an der Fernsteuerung nicht vorgesehen hat. Ja, da ist ein feiner kleiner Schalter bezeichnet mit P und A, aber auf A geschaltet, wird der ATTI-Modus jedoch nicht eingeschaltet, außer man gibt ihn vorher in der DJI Go-App frei.
Im Bild oben beachte man die Option „Multiple Flight Mode“. Erst mit Multiple Flight Mode aktiviert, kann man mit dem Schalter an der Fernbedienung auf „A“ = ATTI-Modus schalten. Fliegen im ATTI-Modus unterscheidet sich jetzt nicht allzu sehr vom Fliegen im GPS-Modus: der Kopter wird seine Höhe auch weiterhin beibehalten und die Kontrolle funktioniert noch genauso. Der Hauptunterschied ist, dass der Kopter nun nicht mehr seine Position automatisch hält, er wird nun durch Wind und auch durch seine eigene Trägheit beeinflusst.
Ich denke immer über den ATTI-Modus als einen Kieselstein auf einem zugefrorenen See: Wenn man ihm einen Stoß in eine Richtung gibt, er wird sie beibehalten, um ihn zu stoppen muß man ihn in die entgegengesetzte Richtung stoßen. Praktiziere das Fliegen im ATTI im DJI Simulator und dann versuche es auf einem freien Feld, wo es genügend Platz gibt, um auch mal Fehler zu machen. Es sollte nicht sehr lange dauern den Kopter in der Griff zu bekommen, und dann hast du das Können die Kontrolle zu übernehmen wenn GPS ausfällt oder GPS nicht richtig funktioniert.
Ich betrachte P-GPS immer als ein nur gelegentlich einzusetzendes Feature und fliege die meiste Zeit im ATTI-Modus.
Ich starte immer im ATTI-Modus da man im schlimmsten Fall einen GPS Defekt erst nach dem Start entdeckt, wenn man wenig Zeit hat sich auf die Situation einzustellen.
Ganz offensichtlich erfordert dies umsichtiges Verhalten wenn es windig ist, so soll man es mit Bedacht versuchen und sich über die Windrichtung und Windgeschwindigkeit bewusst sein.
8. Überprüfe Propeller und überprüfe sie nochmals
Ich sehe so viele Berichte von Leuten deren Kopter wegen eines weg geflogenen Propellers gechrashed ist. Während ich mir sicher bin, das ein Propeller verschleißen oder brechen kann er, nehme ich an, dass in den meistens Fällen der Propeller beim ersten Mal nicht fest aufgesetzt worden ist. Wir Menschen tendieren dazu, Fehler zu machen und wenn wir dies wiederholt machen, wie beim Aufsetzen der Propeller, so ist es sehr leicht etwas zu übersehen.
Falls selbst sichernde Props verwendet werden, kurbelt sie auf, und haltet dann den Motor fest für das abschließende Festziehen des Propellers. Beim Inspire1 kann man mit prop-locks das Risiko weiter reduzieren, dass sich ein Propeller lockert. Falls DJI’s neue quick release props mit Inspire1 or Matrice verwendet werden, gilt es sicherzustellen, das jeder Propeller in seiner Rastposition aufgesteckt wird.
9. Nutze eine Pre-Flight Check Liste
Eine Pre-Flight Check Liste zu verwenden kann langweilig sein, besonders wenn du aufgeregt bist und gerade starten willst, jedoch es gibt keinen besseren Weg, als das du dir versichern kannst, alles getan zu haben, um einen betriebssicheren Flug zu gewährleisten.
Es ist nicht übermäßig kompliziert, wenn du dich nicht ungeschickt anstellst, und jeden Schritt aufschreibst, wirst du feststellen, das es nicht allzu nervig ist all dies anzuwenden. Schreibe einfach die Grunddinge auf und lies es vor dem Aufstieg durch. Es kann so einfach sein wie das folgende:
Airframe: Prepare & check
RC: Fit iPad, cable & Hood
Antennas: correct position
Props & Locks: attach & check
RC Battery: Check min 75%
RC Switches: Correct mode & Gear Down
iPad: App running, map cached, Airplane mode, Volume Up.
Airframe: Position for takeoff
Props: 2nd check
Power On: Check battery 100%
Sensors: Compass 1400 – 1599
Sensors: IMU +/- 0.1
Failsafe: Set failsafe height
Satellite: At least 7 sats & safe to fly box
Flight Mode: Correct mode selected
Start Motors: CSC command
Home Point: Blue dot Location correct on map
Initial Check: motor sound check
Climb: climb to 2m
Control Tests: Test all controls
GPS & ATTI Test: Test both modes function correctly
Landing Gear: Raise Gear and fly!
10. Sichtverbindungslinie= Linie der Kommunikation
Wenn man seinen Kopter noch sehen kann, dann sind die Chancen groß, dass die Fernbedienung auch mit ihm kommunizieren kann. Entfernungen können einen Effekt auf die Radio Kommunikation haben und die Gesetze variieren von Land zu Land, wie weit man einen Kopter fliegen darf. Hier in UK sind wir limitiert auf die Sichtverbindung (definiert als 500m entfernt vom Piloten). Es ist nicht alles über Entfernungen. Gehen wir davon aus, man filmt einen kreisrunden Wasserturm, der lediglich 30 entfernt ist und man denkt über einen schönen Drumherumflug fürs Fotoshooting nach. Selbst wenn der Kopter nur 40 m von uns entfernt ist, wenn er um den Turm herumfliegt, ist die Chance sehr wohl gegeben, dass die Kontrolle des Kopters verloren geht, da das Radiosignal nicht durch den Turm hindurch gesendet werden kann. In diesem Moment schaltet der Kopter in den Failsafe Modus, steigt auf die vorgegebene Höhe auf und fliegt zum Home Point zurück. Falls man die Failsafe-Flughöhe höher als den Turm eingegeben hat und keine anderen Hindernisse auf der Flugroute liegen, ist alle schön und gut. Falls jedoch die Failsafe Höhe niedriger als die Turmhöhe war, dann kann man goodbye Kopter sagen.
Versuche es und halte den Kopter zu allen Zeiten auf Sichtlinie.
11. Erkenne wann VPS abzuschalten ist
Okay, ich weiß das sind mehr als 10 Punkte, dieser eine hier ist ein Bonus.
Der Phantom 3 als auch der Inspire 1 beinhalten beide VPS (Vision Positioning System) Module, die dabei helfen, Position und Niveau bei niedrigen Höhen zu halten. Die meiste Zeit wird einem das VPS helfen, aber es gibt Situationen, in denen es zu Problemen führen könnte, wenn es freigeschaltet ist.
Wenn man im Hause fliegt oder auch außerhalb, wo es Objekten oberhalb vom Kopter gibt, möchte man sich wünschen, das VPS abzuschalten, allein dafür, das der Kopter seine Höhe nicht automatisch hält. Falls z.B. der Kopter über Objekte auf dem Boden fliegt, VPS ist freigeschaltet, resultiert das in einer Anpassung der Höhe, wenn er über jedes Objekt fliegt und kollidiert dadurch möglicherweise mit der Zimmerdecke oder mit Hindernissen über ihm.
Man kann das VPS in der Go-App abschalten, wie im Bild unten sehen kann.

12. Starte immer mit einer voll geladenen Batterie
So die Nennung von nur 10 Dingen mag ein Fehler gewesen sein…. ! Ich hätte dieses noch hinzuzufügen, weil ich einige Crash Berichte gesehen habe, wo der Flug mit zuvor genutzten Batterien gestartet wurde. Es lautete da normalerweise so…
“Ich startete meinen Flug mit 80% Batterieladung und alles war gut, dann plötzlich fiel die Ladungsanzeige auf 7% WTF! “
DJI beantwortete solche Kommentare mit Hinweis darauf, das die intelligenten Batterien vor jedem Start voll geladen sein sollen „as per the manual“, um für ihr Verbrauchs-Monitoring zuverlässige Resultate abzuliefern. Während man wahrscheinlich manchmal mit einer halb geladenen Batterie,rausgehen möchte, könnte obiges passieren, Sei vorsichtig und halte dich in der Nähe auf und flieg nicht soweit vom Landepunkt entfernt.
Ich hoffe all dies erweist sich als nützlich.
Many thanks to Ulrich Schneider for the German Translation. – Paul.
Nichts, aber auch rein GAR NICHTS hat durch Politik der CDU-Grünen-SPD und FDP in den letzten 10 Jahren zum Wohlergehen der Bürger geführt!!
NICHTS! TIME TO CHANGE
TIME TO CHANGE 
NICHTS!
TIME TO CHANGE